- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

스테퍼 모터와 서보 및 서보 모터의 차이점을 이해하는 기사
I. 스테퍼 모터와 서보 및 서보 모터의 차이점
스테퍼 모터: 개방 루프 제어 요소 스테퍼 모터 부품의 각도 변위 또는 라인 변위로 변환되는 전기 펄스 신호입니다. 간단히 말해서 전기 펄스 신호를 사용하여 각도와 회전 수를 제어합니다. 그래서 그는 회전 정도를 결정하기 위해 펄스 신호에만 의존합니다. 센서가 없기 때문에 정지 각도가 어긋날 수 있습니다. 그러나 정밀한 펄스 신호는 편차를 최소화합니다.
서보 모터: 서보 제어 회로를 사용하여 모터 속도를 제어하고 센서를 통해 회전 위치를 제어합니다. 따라서 위치 제어가 매우 정확합니다. 그리고 회전 속도도 가변적입니다.
서보(전자 서보): 서보의 주요 구성 요소는 서보 모터입니다. 서보 모터 제어 회로 + 감속기 세트가 포함되어 있습니다. 아, 서보모터에는 감속기어 세트가 없습니다. 그리고 서보에는 감속기어 세트가 있습니다.
리미트 서보의 경우 출력 샤프트 아래의 전위차계를 사용하여 방향타 암의 조향 각도를 결정합니다. 서보 신호 제어는 펄스 폭 변조(PWM) 신호로, 마이크로컨트롤러가 이 신호를 쉽게 생성할 수 있습니다.
II. 스테퍼 모터 기본 원리
작동 방식:
일반적으로 모터의 회전자는 영구 자석이며, 고정자 권선을 통해 전류가 흐를 때 고정자 권선은 벡터 자기장을 생성합니다. 이 자기장은 회전자가 각도만큼 회전하도록 구동하므로 회전자의 자기장 쌍의 방향은 고정자의 자기장의 방향과 동일하게 됩니다. 고정자의 벡터 자기장이 각도만큼 회전할 때. 로터도 이 자기장에 의해 각도만큼 회전합니다. 각 입력 전기 펄스에 대해 모터는 한 각도 단계 앞으로 회전합니다. 출력 각변위는 입력 펄스 수에 비례하고, 회전 속도는 펄스 주파수에 비례합니다. 권선에 전원이 공급되는 순서를 변경하면 모터가 역전됩니다. 따라서 펄스 수와 주파수, 모터의 각 위상 권선에 전원을 공급하는 순서를 제어하여 스테퍼 모터의 회전을 제어할 수 있습니다.
발열 원리:
일반적으로 모든 종류의 모터를 볼 수 있으며 내부에는 철심과 권선 코일이 있습니다. 권선 저항, 전력 손실, 손실 크기 및 저항이 발생하며 전류는 제곱에 비례합니다. 이는 종종 구리 손실이라고도 하며, 전류가 표준 DC 또는 사인파가 아닌 경우 고조파 손실도 발생합니다. 코어에는 히스테리시스 와전류 효과가 있으며 교류 자기장에서도 손실이 발생하며 재료의 크기, 전류, 주파수, 전압과 관련되어 이를 철 손실이라고 합니다. 동손과 철손은 발열의 형태로 나타나 모터의 효율에 영향을 미칩니다. 스테핑 모터는 일반적으로 위치 정확도와 토크 출력을 추구하며 효율은 상대적으로 낮고 전류는 일반적으로 더 크며 고조파 성분은 높으며 전류의 주파수는 속도 및 변화에 따라 교대로 발생하므로 스테핑 모터는 일반적으로 열 상황이 있으며 상황은 일반 AC 모터보다 더 심각합니다.
III. 방향타 건설
서보는 주로 하우징, 회로 기판, 구동 모터, 기어 감속기 및 위치 감지 요소로 구성됩니다. 작동 원리는 수신기가 서보에 신호를 보내고 회로 기판의 IC가 코어리스 모터를 구동하여 회전을 시작하고 동력이 감속 기어를 통해 스윙 암에 전달되는 동시에 위치 감지기가 위치에 도달했는지 여부를 확인하기 위해 신호를 다시 보내는 것입니다. 위치 검출기는 실제로 가변 저항기입니다. 서보가 회전하면 그에 따라 저항 값이 변경되며, 저항 값을 감지하여 회전 각도를 알 수 있습니다. 일반 서보 모터는 3극 회전자를 감싸는 얇은 구리선으로, 코일에 전류가 흐르면 자기장이 발생하고, 회전자 자석 주변에는 반발력이 생겨 회전력이 발생합니다. 물리학에 따르면 물체의 관성 모멘트는 질량에 정비례하므로 회전하려는 물체의 질량이 클수록 필요한 힘도 커집니다. 빠른 회전 속도와 낮은 전력 소비를 달성하기 위해 서보는 얇은 구리선을 꼬아 만든 매우 얇은 중공 실린더로 만들어져 극이 없는 매우 가벼운 중공 로터를 형성하며 실린더 내부에 자석이 배치되어 있는 중공 컵 모터입니다.
다양한 작업 환경에 맞게 방수 및 방진 설계를 갖춘 서보가 있습니다. 다양한 부하 요구 사항에 따라 서보용 플라스틱 기어와 금속 기어가 있으며, 서보용 금속 기어는 일반적으로 토크가 높고 속도가 빠르며 과도한 부하로 인해 기어가 부서지지 않는다는 장점이 있습니다. 더 높은 등급의 서보에는 볼 베어링이 장착되어 회전이 더 빠르고 정확해집니다. 볼 베어링 1개와 볼 베어링 2개에는 차이가 있습니다. 물론 볼 베어링 2개가 더 좋습니다. 새로운 FET 서보는 주로 FET(Field Effect Transistor)를 사용하는데, 이는 내부 저항이 낮아 일반 트랜지스터보다 전류 손실이 적다는 장점이 있습니다.
IV. 서보 작동 원리
바이어스 전압을 생성하기 위해 PWM 파에서 내부 회로로 접촉기 발전기는 감속 기어를 통해 전위차계를 구동하여 이동하므로 전압 차이가 0이 되면 모터가 정지하여 서보 효과를 얻습니다.
서보 PWM의 프로토콜은 모두 동일하지만 나타나는 최신 서보는 다를 수 있습니다.
프로토콜은 일반적으로 다양한 각도로 회전하도록 서보를 제어하기 위해 0.5ms ~ 2.5ms의 높은 수준의 폭입니다.
V. 서보 모터의 작동 원리
아래 그림은 전력연산증폭기 LM675로 만든 서보모터 제어회로를 나타내며, 모터는 DC서보모터이다. 그림에서 알 수 있듯이 전력연산증폭기 LM675에는 15V가 공급되는데, RP1을 통해 연산증폭기 LM675의 동위상 입력에 15V 전압이 더해지며, 서보모터의 입력에는 LM675의 출력전압이 더해진다. 모터에는 모터 속도를 실시간으로 감지하기 위한 속도 측정 신호 발생기가 장착되어 있습니다. 실제로 속도 신호 발생기는 일종의 발생기이며 출력 전압은 회전 속도에 비례합니다. 속도 측정 신호 발생기(G)에서 출력된 전압은 분압 회로를 거쳐 속도 오차 신호로서 연산 증폭기의 반전 입력으로 피드백된다. 속도 명령 전위차계 RP1에 의해 설정된 전압 값은 기준 전압과 동일한 R1.R2로 전압 분배 후 연산 증폭기의 동위상 입력에 추가됩니다.
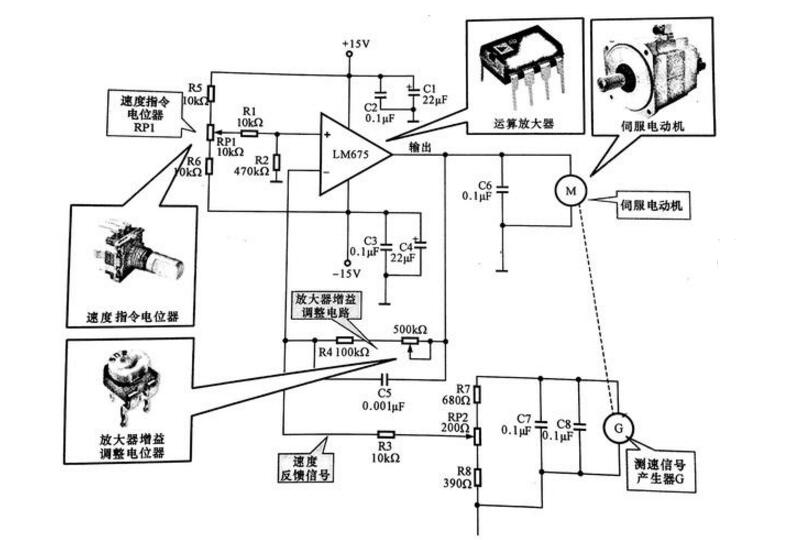
서보 모터의 제어 회로도
서보 모터: 서보 모터의 문자 M으로 표시되며 구동 시스템의 전원 공급원입니다. 연산 증폭기: 회로 이름으로 표시되는 LM675는 서보 모터에 구동 전류를 제공하는 서보 제어 회로의 증폭기 부품입니다.
속도 명령 전위차계 RP1: 회로 내 연산 증폭기의 기준 전압, 즉 속도 설정을 설정합니다. 증폭기 이득 조정 전위차계 RP2: 회로에서 증폭기 이득과 속도 피드백 신호의 크기를 각각 미세 조정하는 데 사용됩니다.
모터의 부하가 변하면 연산증폭기의 반전입력으로 피드백되는 전압도 변화한다. 즉, 모터의 부하가 증가하면 속도는 감소하고 속도신호발생기의 출력전압도 감소하므로 연산증폭기의 반전입력의 전압은 감소하고 이 전압과 기준전압의 차이가 증가하여 연산증폭기의 출력전압이 증가한다. 반대로, 부하가 작아지고 모터 속도가 증가하면 속도 측정 신호 발생기의 출력 전압이 상승하고 연산 증폭기의 반전 입력에 추가되는 피드백 전압이 증가하여 이 전압과 기준 전압의 차이가 감소하여 연산 증폭기의 출력 전압이 감소하고 이에 따라 모터 속도가 감소하여 회전 속도가 자동으로 설정 값으로 안정될 수 있습니다.